
360環(huán)視實時性評估:GPU加速性能與AI拓展?jié)摿?基于米爾RK3576
http://www.debgrams.com 2025-11-27 14:59 來源:米爾電子
一、 項目背景與測試平臺
本次360環(huán)視系統(tǒng)原型基于米爾科技MYD-LR3576開發(fā)板進行構(gòu)建與評估。該開發(fā)板所搭載的瑞芯微RK3576芯片,集成了4核Cortex-A72、4核Cortex-A53、Mali-G52 GPU及高達6TOPS算力的NPU。本文旨在通過實際測試數(shù)據(jù),從功能實現(xiàn)、實時性能與AI拓展?jié)摿θ蠛诵木S度,為客戶提供一份關(guān)于該平臺在360環(huán)視應(yīng)用中能力的真實參考。
二、 系統(tǒng)流程與功能實現(xiàn)
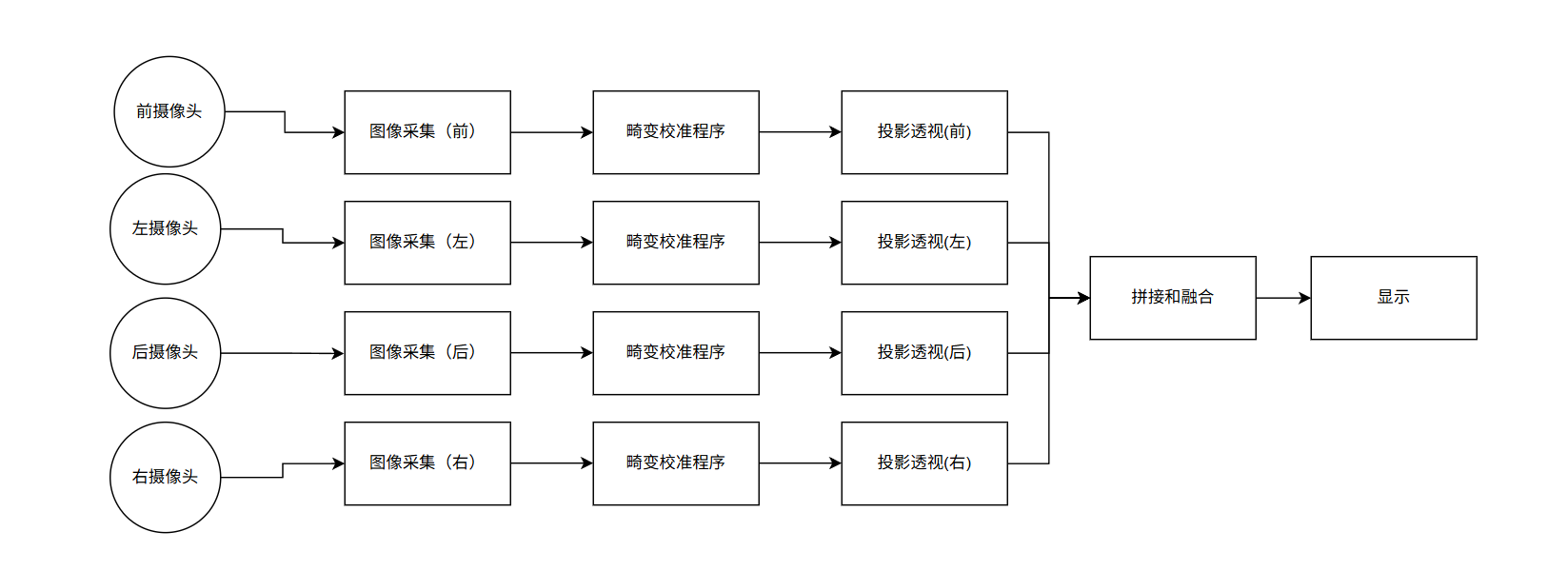
圖:程序流程圖
一套標(biāo)準(zhǔn)的360環(huán)視處理流水線已在開發(fā)板上成功實現(xiàn),驗證了其功能可行性:
1.傳感器配置: 4路720P分辨率魚眼攝像頭,精確固定于模擬車輛的四周。
2.核心處理流水線:
畸變矯正: 利用張正友標(biāo)定法預(yù)先獲取攝像頭內(nèi)參和畸變系數(shù),實時消除魚眼鏡頭產(chǎn)生的圖像扭曲。
投影變換: 通過預(yù)設(shè)的單應(yīng)性矩陣(Homography Matrix),將矯正后的透視圖像轉(zhuǎn)換為統(tǒng)一的俯瞰視角鳥瞰圖。
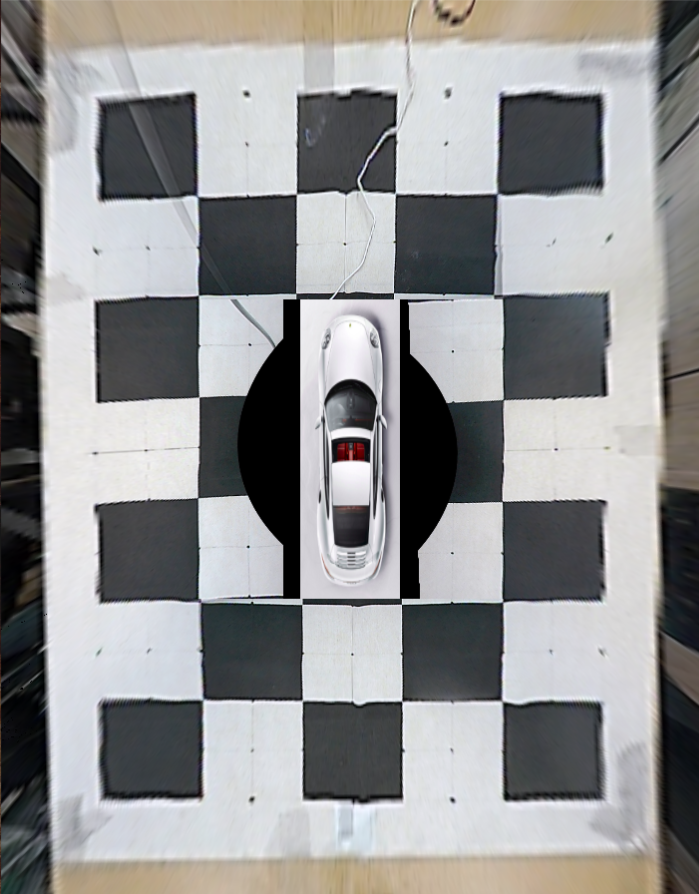
圖像拼接: 依據(jù)預(yù)先標(biāo)定的位置關(guān)系,將四張鳥瞰圖無縫合成為一張完整的360°全景俯視圖。
顯示: 為快速驗證核心流程,目前采用OpenCV imshow函數(shù)進行結(jié)果顯示,已知其效率非最優(yōu),后續(xù)將優(yōu)化為DRM/KMS等低延遲工業(yè)級方案。
畸變矯正前:

畸變矯正后:

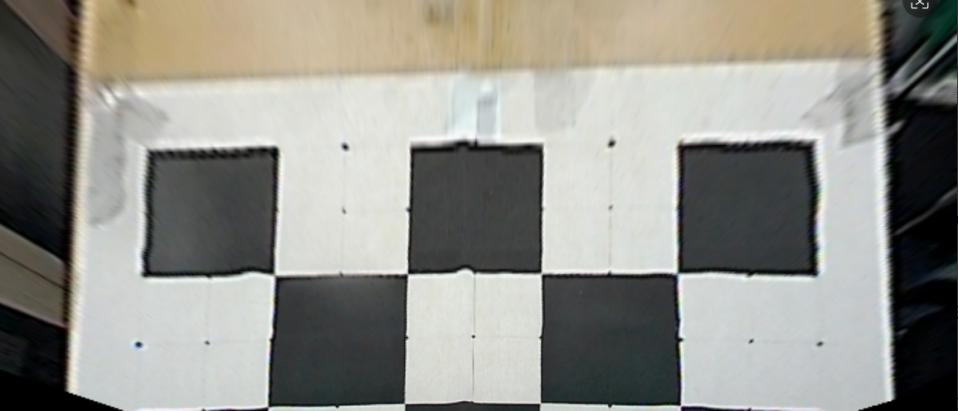
投影視圖:
圖像拼接效果:
360環(huán)視視頻效果演示:
三、 性能實測:CPU與GPU的算力博弈
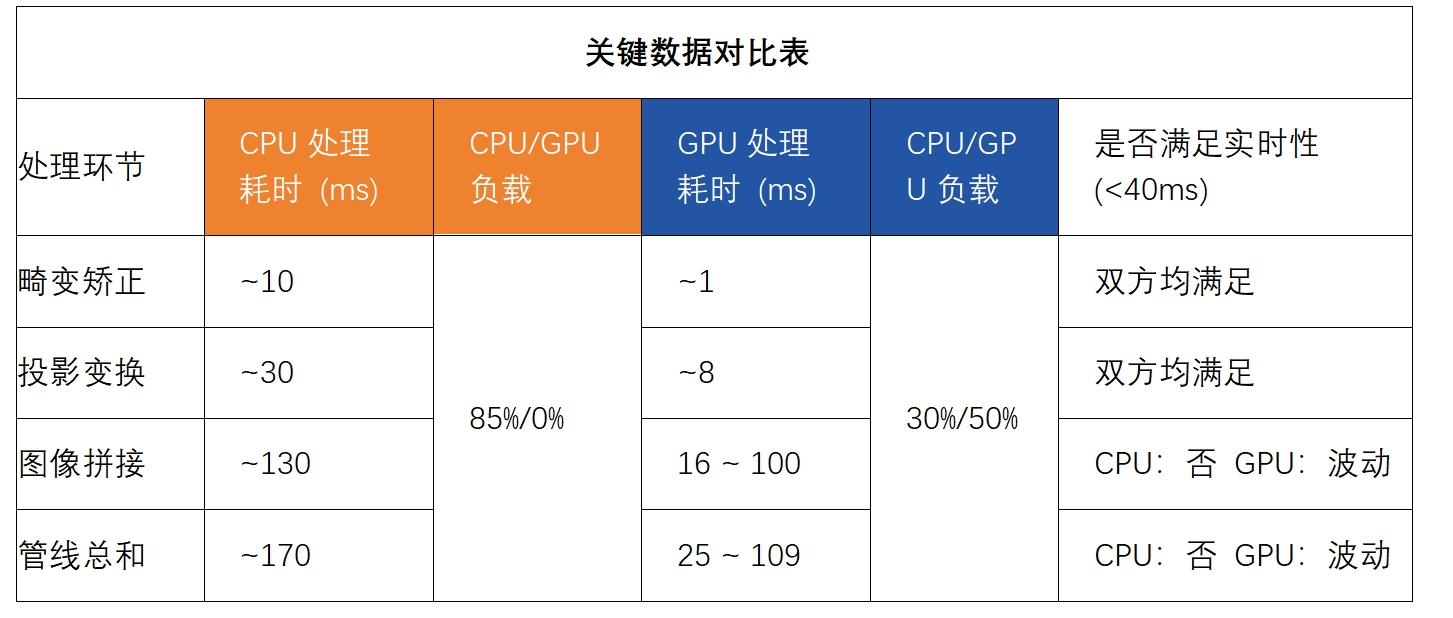
性能是決定方案能否商用的關(guān)鍵。我們以行業(yè)通用的25fps(即每幀處理間隔40ms)作為實時性標(biāo)準(zhǔn),在米爾MYD-LR3576開發(fā)板上對數(shù)據(jù)處理管線進行了精細的性能剖析,關(guān)鍵數(shù)據(jù)對比如下:
圖:CPU負載情況

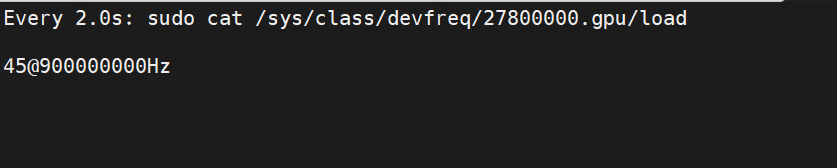
圖:GPU負載情況
深度性能分析:
CPU方案:功能完整,但實時性無望
如上表數(shù)據(jù)所示,當(dāng)所有處理任務(wù)均由CPU承擔(dān)時,總耗時高達170ms,遠超40ms的預(yù)算。其中,計算密集型的圖像拼接成為絕對的性能瓶頸,幾乎占滿了所有A72大核的資源。這不僅導(dǎo)致系統(tǒng)無法實時處理視頻流,造成嚴重卡頓和延遲,也使得CPU再無余力處理其他系統(tǒng)任務(wù),此方案不具備產(chǎn)品化價值。
GPU方案:潛力巨大,穩(wěn)定性是當(dāng)前關(guān)鍵瓶頸
卓越的算力體現(xiàn): 在畸變矯正和投影變換環(huán)節(jié),Mali-G52 GPU展現(xiàn)了其強大的并行計算能力,耗時相比CPU降低了數(shù)倍至一個數(shù)量級,且占用率較低,證明其處理此類像素級操作的高效性。
拼接環(huán)節(jié)的性能波動: 圖像拼接的耗時在16ms到100ms之間劇烈波動,這是阻礙當(dāng)前方案投入實用的核心問題。GPU占用率的相應(yīng)大幅變動,暗示了問題根源。
根因推測與進展: 這種波動極有可能源于GPU內(nèi)部的內(nèi)存管理機制,如圖像數(shù)據(jù)在顯存中的頻繁拷貝、同步等待或驅(qū)動調(diào)度開銷。我們已將此性能波動問題作為高優(yōu)先級案例提交給瑞芯微原廠技術(shù)支持。若能通過驅(qū)動或底層優(yōu)化將拼接時間穩(wěn)定在16ms的理想?yún)^(qū)間,則整個GPU處理管線可在25ms內(nèi)完成,完全滿足一幀內(nèi)的處理需求。
四、 未來拓展:釋放NPU算力,實現(xiàn)從“看到”到“理解”的飛躍
當(dāng)GPU處理管線優(yōu)化完成后,我們將獲得一個極具吸引力的系統(tǒng)狀態(tài):充裕的時間預(yù)算和富余的CPU資源。這為集成更高價值的AI功能奠定了堅實基礎(chǔ)。
剩余時間預(yù)算分析:
在25fps幀率下,系統(tǒng)必須在40ms內(nèi)完成一幀的所有處理。假設(shè)GPU流水線穩(wěn)定在25ms完成環(huán)視基礎(chǔ)處理,那么系統(tǒng)還剩下約15ms的時間裕度。
NPU的用武之地:
這15ms的寶貴時間,正是留給RK3576內(nèi)置的6TOPS NPU大顯身手的舞臺。我們可以利用這部分算力,在環(huán)視全景圖或原始魚眼圖上并行運行輕量化的AI模型,實現(xiàn)功能的全面升級,例如:
障礙物檢測與識別: 精準(zhǔn)識別車輛周圍的行人、車輛、錐桶等障礙物。
空間距離估算: 基于俯視圖的幾何關(guān)系,實時計算識別出的物體與車身的精確距離。
主動預(yù)警系統(tǒng): 當(dāng)距離低于安全閾值時,立即觸發(fā)聲音或視覺警報,實現(xiàn)真正的主動安全功能。
總結(jié)與展望
圖:米爾基于RM3576開發(fā)板
功能實現(xiàn): 基于米爾MYD-LR3576開發(fā)板的RK3576平臺完全具備實現(xiàn)高質(zhì)量360環(huán)視全鏈路功能的能力。
實時性能: 純CPU方案無法滿足25fps實時需求。GPU方案擁有足夠的算力潛力,但其執(zhí)行的穩(wěn)定性是當(dāng)前能否商用的關(guān)鍵挑戰(zhàn)。
方案潛力與價值: 一旦GPU性能穩(wěn)定,RK3576憑借其異構(gòu)計算架構(gòu)(CPU+GPU+NPU),能夠在一幀時間內(nèi)不僅完成環(huán)視合成,更能集成復(fù)雜的AI感知與預(yù)警功能。這使其從一個單純的環(huán)視處理器,升級為一個高集成度、高附加值的智能視覺平臺。
相關(guān)新聞
- ? 從兩輪車儀表到工程機械環(huán)視,米爾電子助力國產(chǎn) HMI 顯控一體化突圍
- ? 【深度實戰(zhàn)】米爾RK3576開發(fā)板AMP非對稱多核開發(fā)指南:從配置到實戰(zhàn)
- ? 定制未來,共建生態(tài),米爾出席安路研討會
- ? 米爾SECC方案助力國標(biāo)充電樁出海
- ? 米爾RK3576邊緣計算盒精準(zhǔn)驅(qū)動菜品識別模型性能強悍
- ? 米爾與安路聯(lián)合亮相VisionChina 2025,共推FPGA視覺方案
- ? 經(jīng)典再進化:米爾ZYNQ 7010/7020全面適配2024.2工具鏈
- ? 經(jīng)典再進化:米爾ZYNQ 7010/7020全面適配2024.2工具鏈
- ? 從微秒級響應(yīng)到確定性延遲:深入解析米爾全志T536核心板的實時性技術(shù)突破
- ? 米爾電子獲全志科技生態(tài)認證,共推工業(yè)智能化升級
編輯精選
- ? 全球工業(yè)軟件巨頭落戶深圳 達索系統(tǒng)大灣區(qū)運營總部啟用
- ? 我國牽頭制定 全球首個工業(yè)5G國際標(biāo)準(zhǔn)正式發(fā)布
- ? 新技術(shù)新產(chǎn)品新場景大規(guī)模應(yīng)用,制造業(yè)這么干!
- ? 2025中國機器人產(chǎn)業(yè)發(fā)展大會在上海舉行
- ? 首屆「新時達杯」機器人技能應(yīng)用大賽全面啟動
- ? 匯川技術(shù)將在南京打造全國最大機器人產(chǎn)業(yè)基地
- ? 西門子發(fā)布2025財年業(yè)績 以“ONE Tech Company”計劃邁入下一增長階段
- ? 2025年第三季度中國交流伺服整體市場業(yè)績增長超10%,“老牌黑馬”強勢突圍
- ? 2025年10月份規(guī)模以上工業(yè)增加值增長4.9%
- ? ABB電氣連續(xù)21年榮登中國電氣工業(yè)百強榜,多領(lǐng)域斬獲十強殊榮
工控原創(chuàng)
- ? 統(tǒng)一以太網(wǎng)標(biāo)準(zhǔn)再迎里程碑,SPE 和 Ethernet-APL 解鎖工業(yè)數(shù)字化新機遇
- ? 11月RatingDog中國制造業(yè)PMI降至49.9,供需走弱重回收縮區(qū)間
- ? 11月工控圈發(fā)生了這些矚目的大事件
- ? 十月工控領(lǐng)域重要資訊,一睹為快!
- ? 回顧 | 以技術(shù)干貨 + 落地案例,解鎖產(chǎn)業(yè)升級新路徑
- ? ABB報告:工業(yè)停機每小時損失高達50萬美元,知行鴻溝阻礙現(xiàn)代化更新
- ? ABB宣布以53.75億美元將機器人業(yè)務(wù)出售給軟銀
- ? 九月不容錯過的工控圈大事
- ? 當(dāng)“軟件定義”與“價值鏈”相遇,未來工業(yè)走向何方?
- ? 西門子:以“一次正確”破局內(nèi)卷,讓工業(yè)AI真正落地


